2024
|
Feith, Nikolaus; Rueckert, Elmar Advancing Interactive Robot Learning: A User Interface Leveraging Mixed Reality and Dual Quaternions Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), 2024. @inproceedings{Feith2024B,
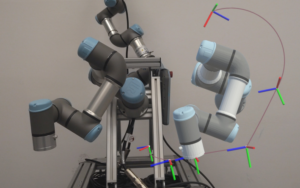
title = {Advancing Interactive Robot Learning: A User Interface Leveraging Mixed Reality and Dual Quaternions},
author = {Nikolaus Feith and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/qCgzbmCJYSH3F97},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
keywords = {Human-Robot-Interaction, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Feith, Nikolaus; Rueckert, Elmar Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Feith2024A,
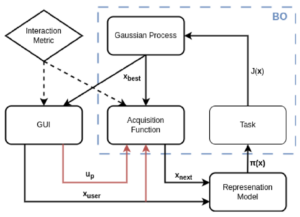
title = {Integrating Human Expertise in Continuous Spaces: A Novel Interactive Bayesian Optimization Framework with Preference Expected Improvement},
author = {Nikolaus Feith and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/6rTWAkoXa3zsJxf},
year = {2024},
date = {2024-04-04},
urldate = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Human-Robot-Interaction, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Lygerakis, Fotios; Dave, Vedant; Rueckert, Elmar M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Lygerakis2024,
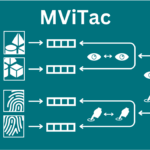
title = {M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation},
author = {Fotios Lygerakis and Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/NPejb2Fp4Y8LeyZ},
year = {2024},
date = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Reinforcement Learning, Tactile Sensing, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Dave*, Vedant; Lygerakis*, Fotios; Rueckert, Elmar Multimodal Visual-Tactile Representation Learning through Self-Supervised Contrastive Pre-Training Proceedings Article In: IEEE International Conference on Robotics and Automation (ICRA 2024)., 2024, (* equal contribution). @inproceedings{Dave2024b,
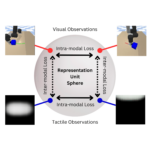
title = {Multimodal Visual-Tactile Representation Learning through Self-Supervised Contrastive Pre-Training},
author = {Vedant Dave* and Fotios Lygerakis* and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/Nw9TprfdDoLgr8e},
year = {2024},
date = {2024-01-28},
urldate = {2024-01-28},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA 2024).},
note = {* equal contribution},
keywords = {deep learning, Tactile Sensing, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2023
|
Lygerakis, Fotios; Rueckert, Elmar CR-VAE: Contrastive Regularization on Variational Autoencoders for Preventing Posterior Collapse Proceedings Article In: Asian Conference of Artificial Intelligence Technology (ACAIT)., 2023. @inproceedings{Lygerakis2023,
title = {CR-VAE: Contrastive Regularization on Variational Autoencoders for Preventing Posterior Collapse},
author = {Fotios Lygerakis and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/fNNRnzJFPrtGQM2},
year = {2023},
date = {2023-08-16},
urldate = {2023-08-16},
booktitle = {Asian Conference of Artificial Intelligence Technology (ACAIT).},
keywords = {computer vision, deep learning, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
2022
|
Dave, Vedant; Rueckert, Elmar Can we infer the full-arm manipulation skills from tactile targets? Workshop 2022, (Workshop in the International Conference on Humanoid Robots (Humanoids 2022)). @workshop{Dave2022WS,
title = {Can we infer the full-arm manipulation skills from tactile targets?},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/f/562953},
year = {2022},
date = {2022-11-28},
urldate = {2022-11-28},
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios.},
note = {Workshop in the International Conference on Humanoid Robots (Humanoids 2022)},
keywords = {Grasping, Manipulation, Movement Primitives, Tactile Sensing, University of Leoben},
pubstate = {published},
tppubtype = {workshop}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios. | 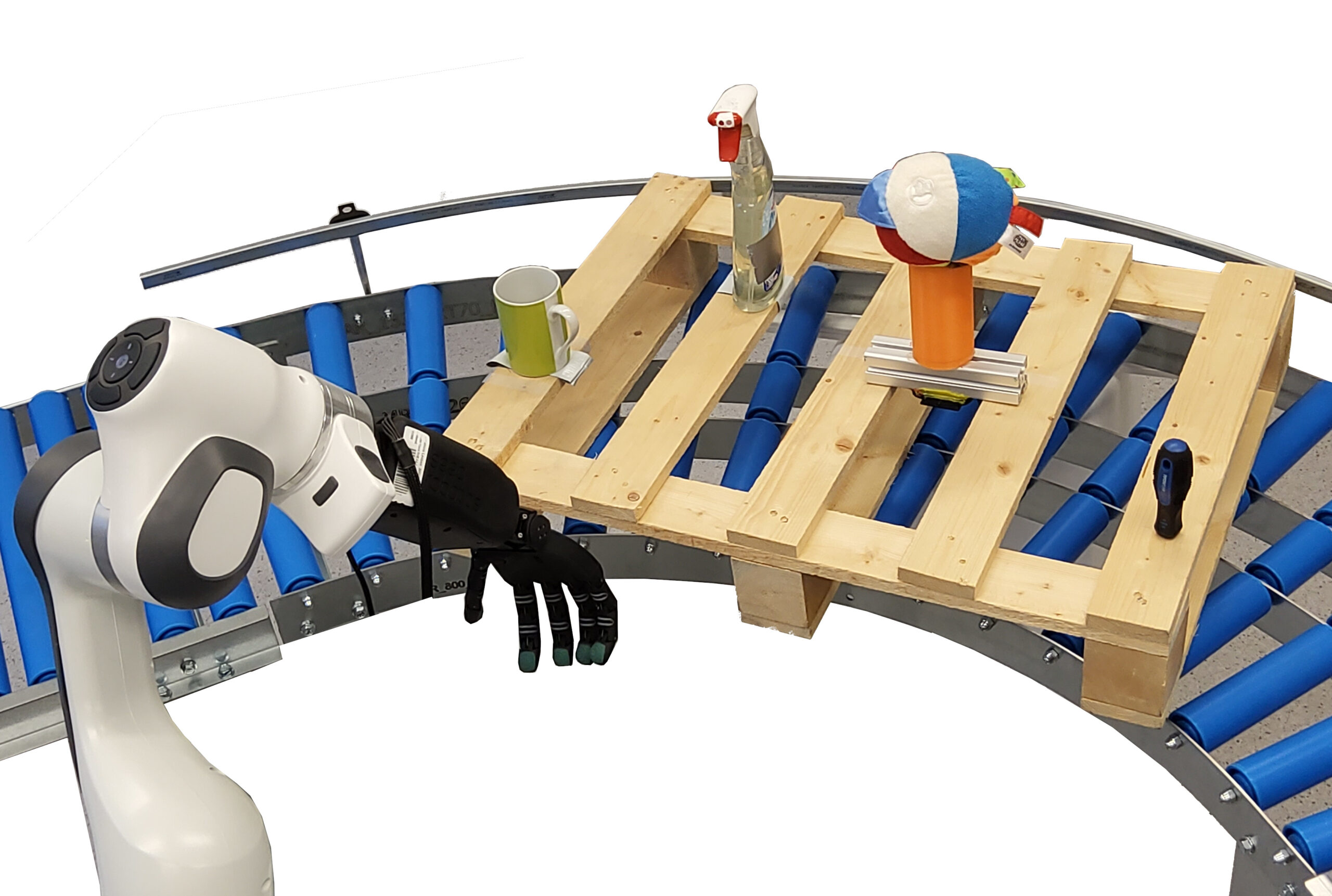 |
Dave, Vedant; Rueckert, Elmar Predicting full-arm grasping motions from anticipated tactile responses Proceedings Article In: International Conference on Humanoid Robots (Humanoids 2022), 2022. @inproceedings{Dave2022,
title = {Predicting full-arm grasping motions from anticipated tactile responses},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/WzGSNtc5WRLN3EL},
year = {2022},
date = {2022-09-26},
urldate = {2022-09-26},
publisher = {International Conference on Humanoid Robots (Humanoids 2022)},
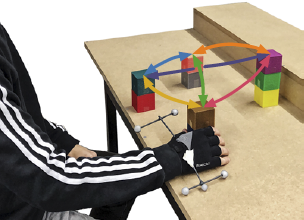
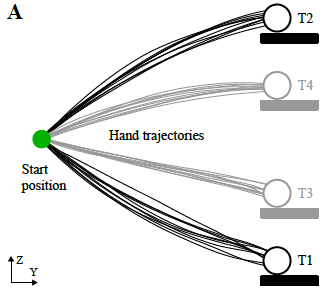
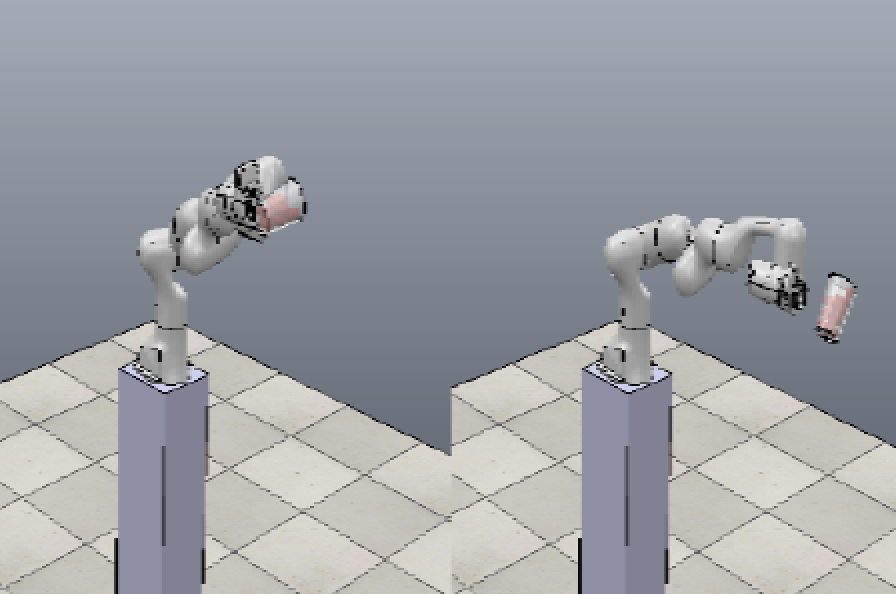
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations.},
keywords = {Grasping, Manipulation, Movement Primitives, Tactile Sensing},
pubstate = {published},
tppubtype = {inproceedings}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Depending on the physical properties of the object, manipulation tasks can exhibit large variation in their movements. For a grasping task, the movement of the arm and of the end effector varies depending on different points of contact on the object, especially if the object is non-homogeneous in hardness and/or has an uneven geometry. In this paper, we propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement. We solely condition on the tactile responses to infer the complex manipulation skills. We formulate a joint trajectory of full-arm joints with tactile data, leverage the model to condition on the desired tactile response from the non-homogeneous object and infer the full-arm (7-dof panda arm and 19-dof gripper hand) motion. We use a Gaussian Mixture Model of primitives to address the multimodality in demonstrations. We also show that the measurement noise adjustment must be taken into account due to multiple systems working in collaboration.
We validate and show the robustness of the approach through two experiments. First, we consider an object with non-uniform hardness. Grasping from different locations require different motion, and results into different tactile responses. Second, we have an object with homogeneous hardness, but we grasp it with widely varying grasping configurations. Our result shows that TacProMPs can successfully model complex multimodal skills and generalise to new situations. |  |
Xue, Honghu; Hein, Benedikt; Bakr, Mohamed; Schildbach, Georg; Abel, Bengt; Rueckert, Elmar Using Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics Journal Article In: Applied Sciences (MDPI), Special Issue on Intelligent Robotics, 2022. @article{Xue2022,
title = {Using Deep Reinforcement Learning with Automatic Curriculum Learning for Mapless Navigation in Intralogistics},
author = {Honghu Xue and Benedikt Hein and Mohamed Bakr and Georg Schildbach and Bengt Abel and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/yddDZ7z9oqxenCi},
doi = {10.3390/app12063153},
year = {2022},
date = {2022-01-31},
urldate = {2022-01-31},
journal = {Applied Sciences (MDPI), Special Issue on Intelligent Robotics},
abstract = {We propose a deep reinforcement learning approach for solving a mapless navigation problem in warehouse scenarios. The automatic guided vehicle is equipped with LiDAR and frontal RGB sensors and learns to reach underneath the target dolly. The challenges reside in the sparseness of positive samples for learning, multi-modal sensor perception with partial observability, the demand for accurate steering maneuvers together with long training cycles. To address these points, we proposed NavACL-Q as an automatic curriculum learning together with distributed soft actor-critic. The performance of the learning algorithm is evaluated exhaustively in a different warehouse environment to check both robustness and generalizability of the learned policy. Results in NVIDIA Isaac Sim demonstrates that our trained agent significantly outperforms the map-based navigation pipeline provided by NVIDIA Isaac Sim in terms of higher agent-goal distances and relative orientations. The ablation studies also confirmed that NavACL-Q greatly facilitates the whole learning process and a pre-trained feature extractor manifestly boosts the training speed.},
keywords = {autonomous navigation, computer vision, deep learning},
pubstate = {published},
tppubtype = {article}
}
We propose a deep reinforcement learning approach for solving a mapless navigation problem in warehouse scenarios. The automatic guided vehicle is equipped with LiDAR and frontal RGB sensors and learns to reach underneath the target dolly. The challenges reside in the sparseness of positive samples for learning, multi-modal sensor perception with partial observability, the demand for accurate steering maneuvers together with long training cycles. To address these points, we proposed NavACL-Q as an automatic curriculum learning together with distributed soft actor-critic. The performance of the learning algorithm is evaluated exhaustively in a different warehouse environment to check both robustness and generalizability of the learned policy. Results in NVIDIA Isaac Sim demonstrates that our trained agent significantly outperforms the map-based navigation pipeline provided by NVIDIA Isaac Sim in terms of higher agent-goal distances and relative orientations. The ablation studies also confirmed that NavACL-Q greatly facilitates the whole learning process and a pre-trained feature extractor manifestly boosts the training speed. | 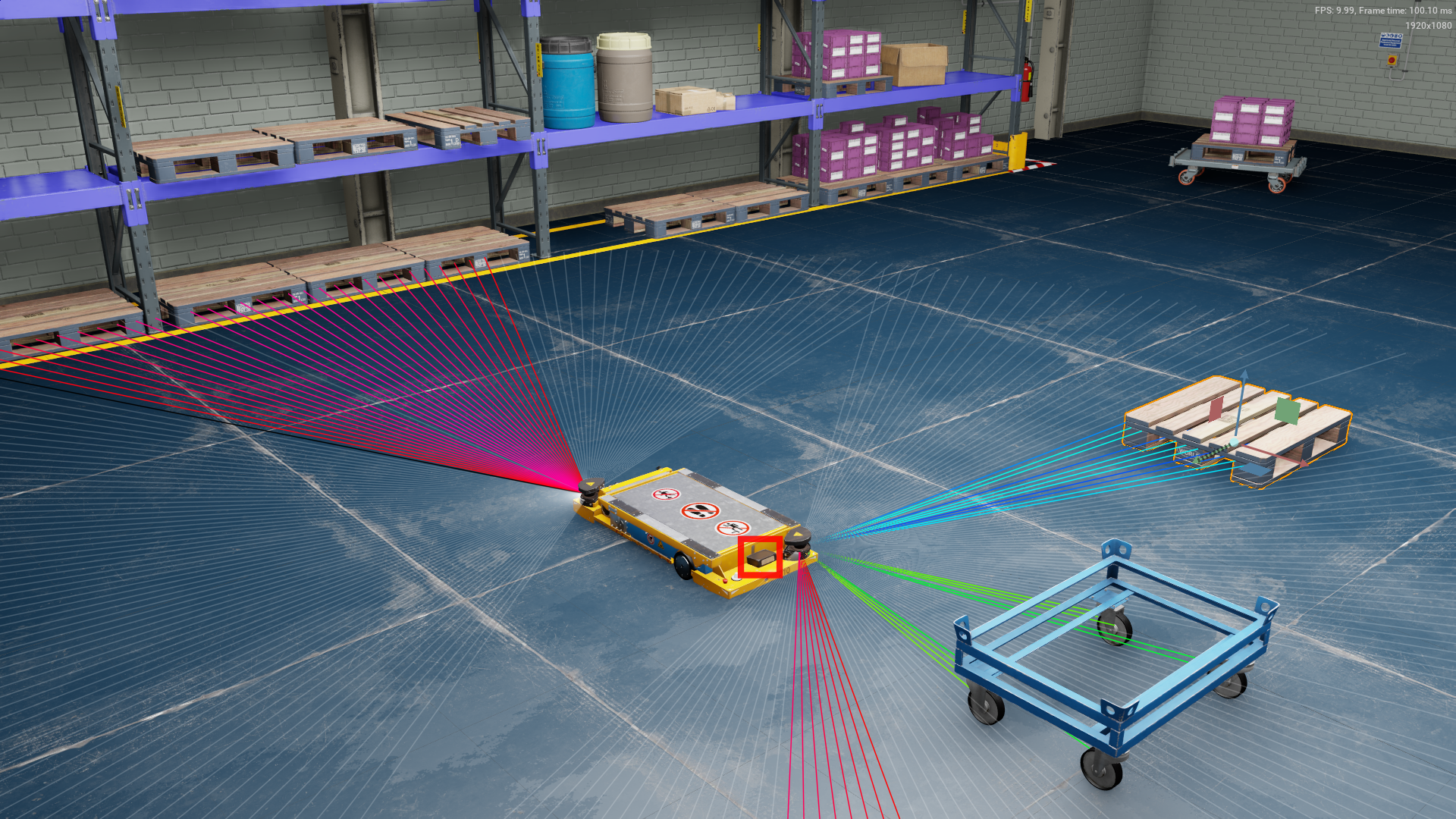 |
2021
|
Del Vecchio, Alessandro; Castellini, Claudio; Beckerle, Philipp Peripheral Neuroergonomics – An Elegant Way to Improve Human-Robot Interaction? Journal Article In: Frontiers in Neurorobotics, vol. 15, pp. 117, 2021, ISSN: 1662-5218. @article{Vecchio2021,
title = {Peripheral Neuroergonomics – An Elegant Way to Improve Human-Robot Interaction?},
author = {Del Vecchio, Alessandro and Castellini, Claudio and Beckerle, Philipp},
doi = {10.3389/fnbot.2021.691508},
issn = {1662-5218},
year = {2021},
date = {2021-09-16},
journal = {Frontiers in Neurorobotics},
volume = {15},
pages = {117},
keywords = {Human-Machine Interfaces, Human-Robot-Interaction, University of Erlangen},
pubstate = {published},
tppubtype = {article}
}
|  |
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Manipulation, Movement Primitives, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
Jamsek, Marko; Kunavar, Tjasa; Bobek, Urban; Rueckert, Elmar; Babic, Jan Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Jamsek2021,
title = {Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller},
author = {Marko Jamsek and Tjasa Kunavar and Urban Bobek and Elmar Rueckert and Jan Babic},
url = {https://cps.unileoben.ac.at/wp/RAL2021Jamsek.pdf, Article File},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Human Motor Control, Movement Primitives, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, 2021. @article{Cansev2021,
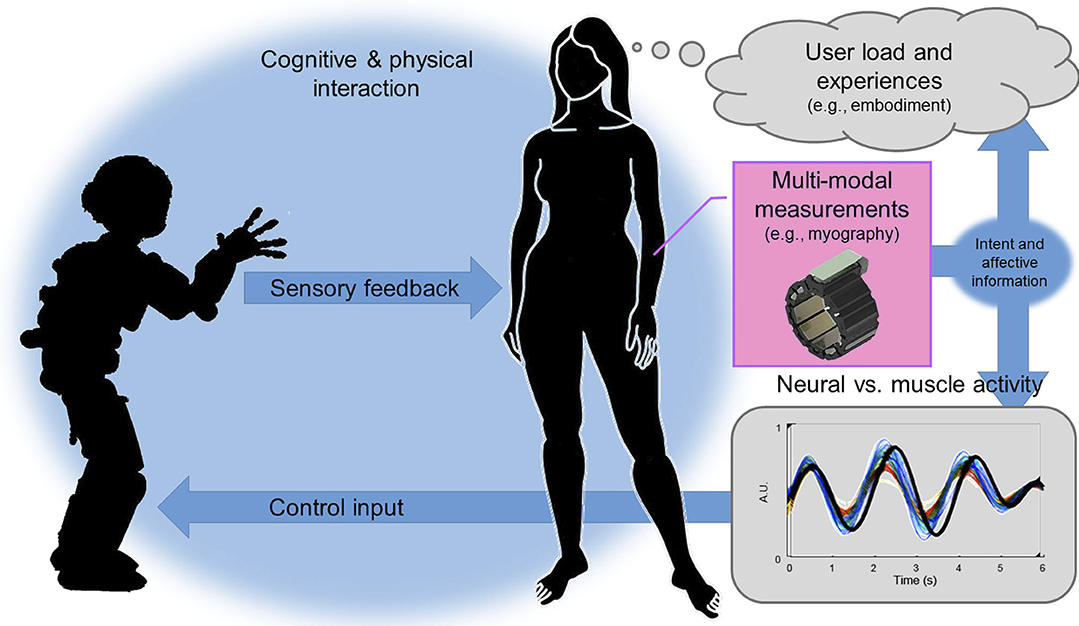
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
keywords = {Human Motor Control, Movement Primitives, Reinforcement Learning, University of Erlangen, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
2020
|
Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS 2020), pp. 1–8, 2020. @inproceedings{Rottmann2020,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-26},
booktitle = {International Conference on Intelligent Robots and Systems (IROS 2020)},
pages = {1--8},
keywords = {Reinforcement Learning, University of Luebeck},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {Manipulation, Reinforcement Learning, University of Luebeck},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |