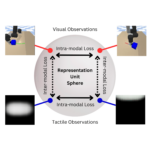
Lygerakis, Fotios; Dave, Vedant; Rueckert, Elmar M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation Proceedings Article In: IEEE International Conference on Ubiquitous Robots (UR 2024), IEEE 2024. @inproceedings{Lygerakis2024,
title = {M2CURL: Sample-Efficient Multimodal Reinforcement Learning via Self-Supervised Representation Learning for Robotic Manipulation},
author = {Fotios Lygerakis and Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/s/NPejb2Fp4Y8LeyZ},
year = {2024},
date = {2024-04-04},
booktitle = {IEEE International Conference on Ubiquitous Robots (UR 2024)},
organization = {IEEE},
keywords = {Reinforcement Learning, Tactile Sensing, University of Leoben},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
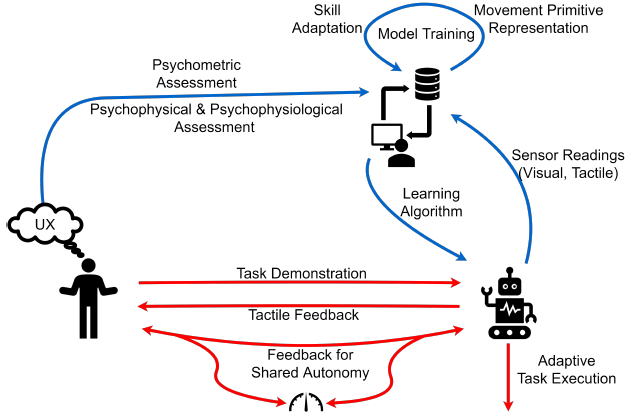
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
keywords = {Human Motor Control, Movement Primitives, Reinforcement Learning, University of Erlangen, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
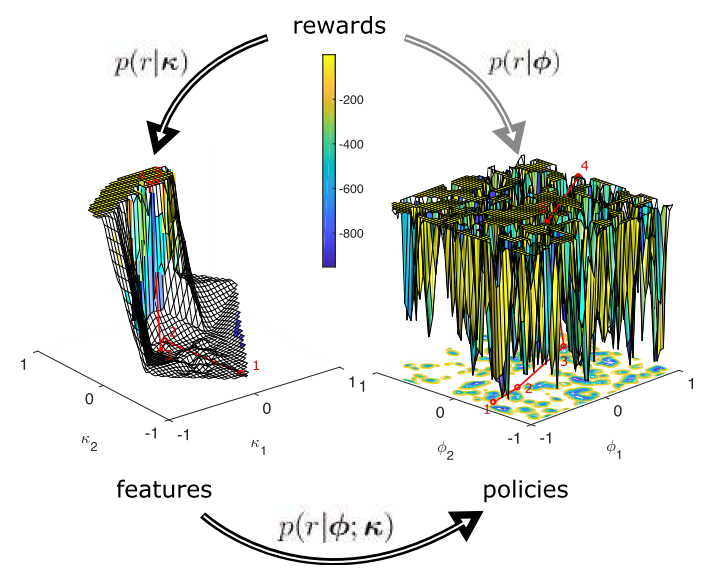
Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Learning Hierarchical Acquisition Functions for Bayesian Optimization Proceedings Article In: International Conference on Intelligent Robots and Systems (IROS 2020), pp. 1–8, 2020. @inproceedings{Rottmann2020,
title = {Learning Hierarchical Acquisition Functions for Bayesian Optimization},
author = {N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/IROS2020Rottmann.pdf, Article File},
year = {2020},
date = {2020-10-26},
booktitle = {International Conference on Intelligent Robots and Systems (IROS 2020)},
pages = {1--8},
keywords = {Reinforcement Learning, University of Luebeck},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |
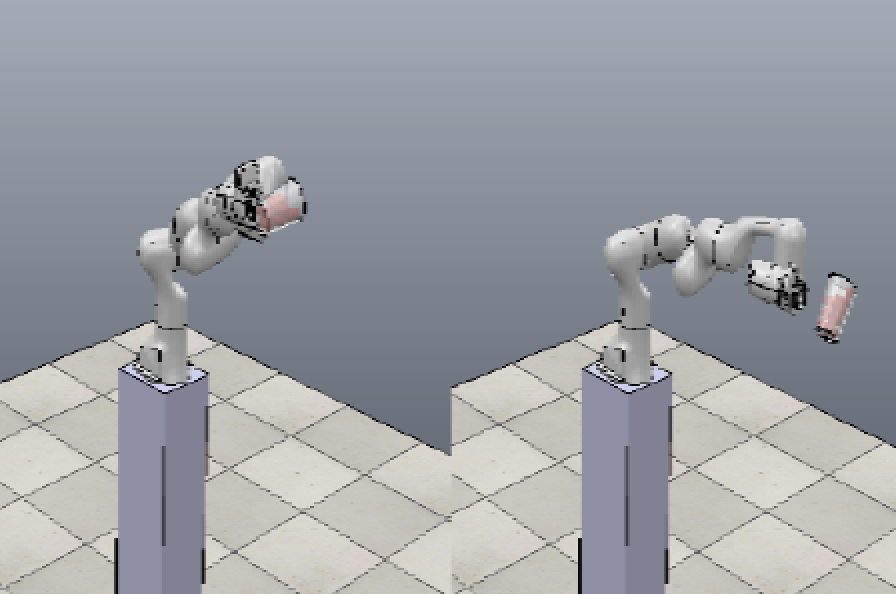
Xue, H.; Boettger, S.; Rottmann, N.; Pandya, H.; Bruder, R.; Neumann, G.; Schweikard, A.; Rueckert, E. Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks Proceedings Article In: International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020), 2020. @inproceedings{Xue2020,
title = {Sample-Efficient Covariance Matrix Adaptation Evolutional Strategy via Simulated Rollouts in Neural Networks},
author = {H. Xue and S. Boettger and N. Rottmann and H. Pandya and R. Bruder and G. Neumann and A. Schweikard and E. Rueckert},
url = {https://cps.unileoben.ac.at/wp/ASPAI2020Xue.pdf, Article File},
year = {2020},
date = {2020-06-30},
booktitle = {International Conference on Advances in Signal Processing and Artificial Intelligence (ASPAI’ 2020)},
keywords = {Manipulation, Reinforcement Learning, University of Luebeck},
pubstate = {published},
tppubtype = {inproceedings}
}
|  |