Date, Time & Location
Nov. 9th, 2020. 10.00-11.00. Virtual Meeting (skype).
Participants
University of Luebeck
Technische Universität Darmstadt
Advisory Board
- Prof. Dr. Elmar Rueckert
- Nils Rottmann, M.Sc.
- Honghu Xue, M.Sc.
- Prof. Dr. Philipp Beckerle
- Ege Cansev, M.Sc.
- Adna Bliek, M.Sc.
Agenda
- Welcome Adna to the team.
- Nils presents the Glove student project progress and the requirements list.
- Ege discusses the review paper submission success (deadline was 31st of October)
- Roadmap Overview Figure (Group interaction points).
- Work programme Check, where are we now. We are still on track!
- Next meeting
Details on the Meeting Notes
TOP 2: Sensor Glove Progress Update
TOP 3: Review Paper Summary after the submission
28th of July discussion with Comau on their robot arm E.Do. The arm features ROS, torque control (via voltage control), interface via a raspberry PI. Estimated price is 6500EURO. This package includes a stand and a gripper.
Roadmap: 4 Franka EMIKA Robot arms should be available at both labs soon. We keep on investigating alternative hardware platforms but will start with the FRANKAs. Nils and Honghu will upload a GIT repo link to the TRAIN webpage and will also add short wiki pages on how to use the code.
TOP 4: Roadmap Overview Figure
Philipp and Ege shared a figure on the TRAIN information flow.
Concrete Inputs for the “Artificial Learner” (AL):
- Task performance.
- Motion and behavior predictability.
- Time dependent importance of the feedback signals.
- Cognitive load (to e.g., reduce the task or model complexity).
- Stress level.
- …
The goal of the AL is to adapt the (1) RL parameters, (2) the skill representation and (3) the feedback controller.
Concrete Inputs for the “Human Instructor” (HI):
- Task performance (the reward score).
- Human/AL entropy estimate (how well the human can explain the AL and vice versa).
https://ieeexplore.ieee.org/abstract/document/7041459 - Transparency?: https://www.frontiersin.org/articles/10.3389/fnbot.2018.00083/full
- …
TOP 5: Work programme
Officially TUD started in June 2020 and UzL in August 2020. Next steps are the glove prototype development, robot arm ordering (Uzl) and the interaction between both (see TOP 4).
TOP 6: Next meeting 13.01.2020 15:00-17:00
Glove update expected by end of December.
Nest meeting is scheduled for January 13th 3pm-5pm.
Supplement
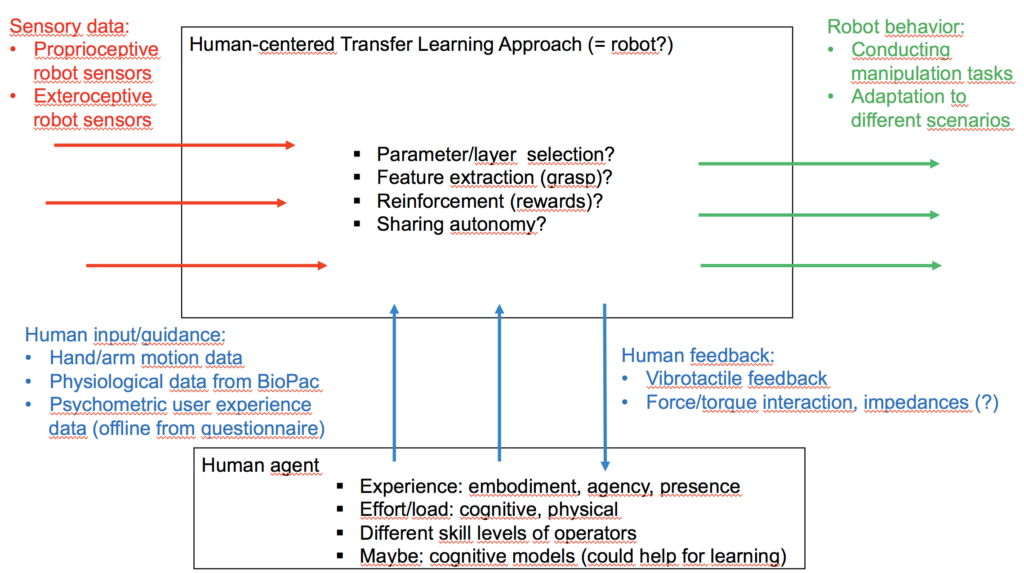
Concept figure draft. Suggested by Philipp and Ege on the interaction in TRAIN.