Dave, Vedant; Rueckert, Elmar Can we infer the full-arm manipulation skills from tactile targets? Workshop 2022. @workshop{Dave2022WS,
title = {Can we infer the full-arm manipulation skills from tactile targets?},
author = {Vedant Dave and Elmar Rueckert},
url = {https://cloud.cps.unileoben.ac.at/index.php/f/562953},
year = {2022},
date = {2022-11-28},
urldate = {2022-11-28},
abstract = {Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios.},
keywords = {Grasping, Manipulation, Movement Primitives, Tactile Sensing, University of Leoben},
pubstate = {published},
tppubtype = {workshop}
}
Tactile sensing provides significant information about the state of the environment for performing manipulation tasks. Manipulation skills depends on the desired initial contact points between the object and the end-effector. Based on physical properties of the object, this contact results into distinct tactile responses. We propose Tactile Probabilistic Movement Primitives (TacProMPs), to learn a highly non-linear relationship between the desired tactile responses and the full-arm movement, where we condition solely on the tactile responses to infer the complex manipulation skills. We use a Gaussian mixture model of primitives to address the multimodality in demonstrations. We demonstrate the performance of our method in challenging real-world scenarios. | 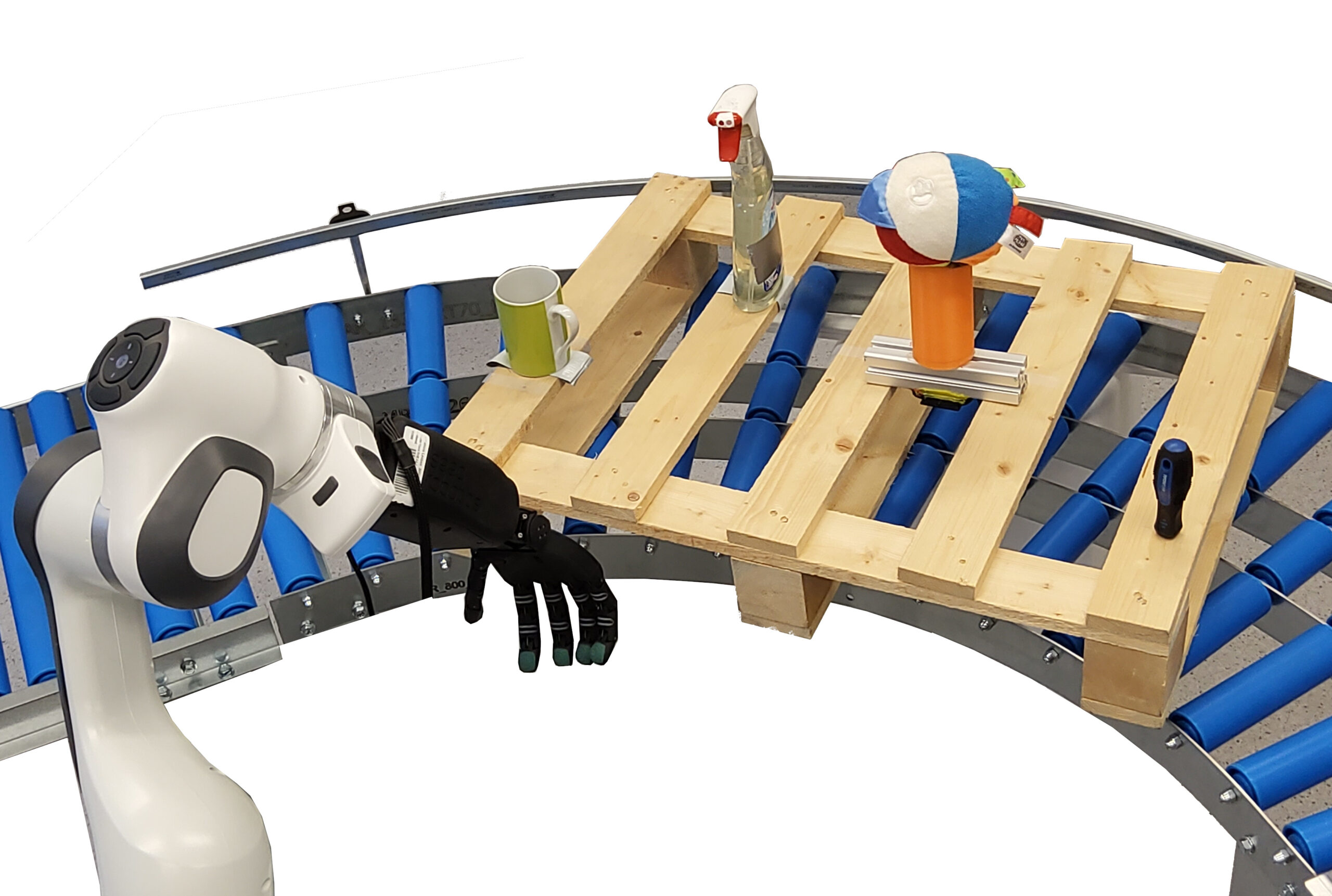 |
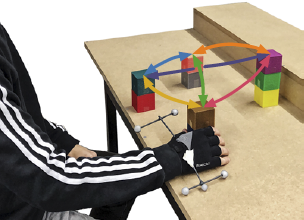
Tanneberg, Daniel; Ploeger, Kai; Rueckert, Elmar; Peters, Jan SKID RAW: Skill Discovery from Raw Trajectories Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Tanneberg2021,
title = {SKID RAW: Skill Discovery from Raw Trajectories},
author = {Daniel Tanneberg and Kai Ploeger and Elmar Rueckert and Jan Peters },
url = {https://cps.unileoben.ac.at/wp/RAL2021Tanneberg.pdf, Article File},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Manipulation, Movement Primitives, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
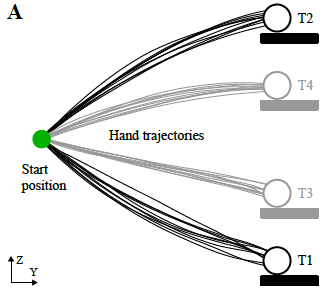
Jamsek, Marko; Kunavar, Tjasa; Bobek, Urban; Rueckert, Elmar; Babic, Jan Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller Journal Article In: IEEE Robotics and Automation Letters (RA-L), pp. 1–8, 2021, (© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.). @article{Jamsek2021,
title = {Predictive exoskeleton control for arm-motion augmentation based on probabilistic movement primitives combined with a flow controller},
author = {Marko Jamsek and Tjasa Kunavar and Urban Bobek and Elmar Rueckert and Jan Babic},
url = {https://cps.unileoben.ac.at/wp/RAL2021Jamsek.pdf, Article File},
year = {2021},
date = {2021-03-10},
journal = {IEEE Robotics and Automation Letters (RA-L)},
pages = {1--8},
note = {© 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.},
keywords = {Human Motor Control, Movement Primitives, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |
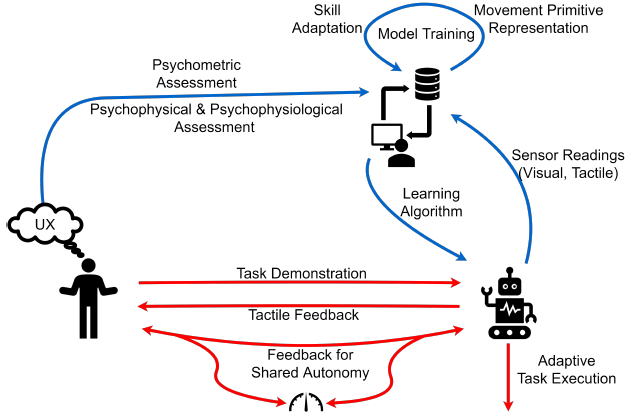
Cansev, Mehmet Ege; Xue, Honghu; Rottmann, Nils; Bliek, Adna; Miller, Luke E.; Rueckert, Elmar; Beckerle, Philipp Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience Journal Article In: Advanced Intelligent Systems, 2021. @article{Cansev2021,
title = {Interactive Human-Robot Skill Transfer: A Review of Learning Methods and User Experience},
author = {Mehmet Ege Cansev and Honghu Xue and Nils Rottmann and Adna Bliek and Luke E. Miller and Elmar Rueckert and Philipp Beckerle},
url = {https://cps.unileoben.ac.at/wp/AIS2021Cansev.pdf, Article File},
doi = {10.1002/aisy.202000247},
year = {2021},
date = {2021-03-10},
journal = {Advanced Intelligent Systems},
keywords = {Human Motor Control, Movement Primitives, Reinforcement Learning, University of Erlangen, University of Luebeck},
pubstate = {published},
tppubtype = {article}
}
|  |